




















 
|
La traversata automatica del braccio robot prende la macchina per i cavi a fibre ottiche all'aperto
Dettagli:
| Luogo di origine: | La Cina |
| Marca: | I-suntop |
| Certificazione: | SGS |
Termini di pagamento e spedizione:
| Quantità di ordine minimo: | 1set |
|---|---|
| Prezzo: | By negotiation |
| Imballaggi particolari: | Scatola di plastica di film+wooden |
| Tempi di consegna: | Giorni di Min.50working |
| Termini di pagamento: | L/C, T/T |
| Capacità di alimentazione: | 10sets/month |
|
Informazioni dettagliate |
|||
| Velocità di avvolgimento: | Massimo 100m/min | Tensione d'avvolgimento: | 30N~300N |
|---|---|---|---|
| Diametro della bobina: | 800-1600mm | Diametro del cavo ottico: | 6-18mm |
| Dimensione di potere: | 2KVA, cavo di CA 3phase+N wire+ground di 380V 50Hz | Servizio: | garanzia 12month |
| Evidenziare: | la traversata automatica 300N prende la macchina,2KVA prendono trasversalmente la macchina |
||
Descrizione di prodotto
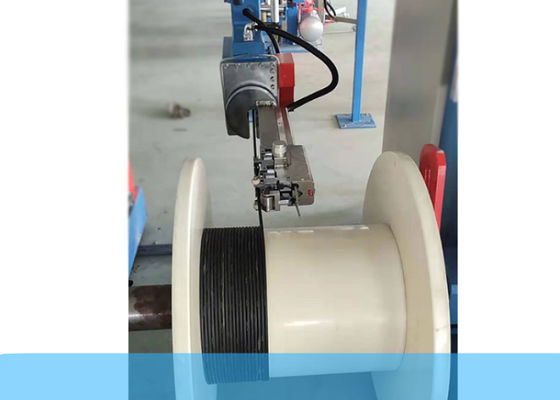
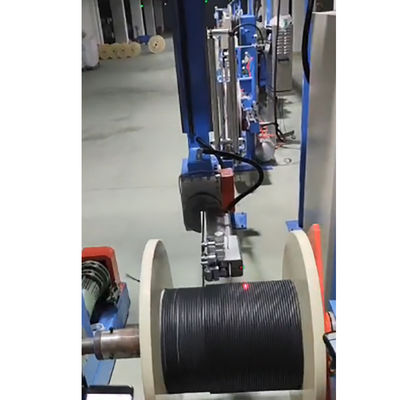
La traversata automatica del braccio robot prende la macchina per i cavi a fibre ottiche all'aperto
macchina 20220228.pdf del cavo a fibre ottiche del i-suntop
applicazione 1.Equipment
Questa macchina pricipalmente utilizzata per l'attraversamento e prendere di tutti i cavi, sicurezza ottimale, nei cavi manuali della presa di posto, riducenti i rischi per la sicurezza. E non assicurare qualità d'avvolgimento uniforme ed incrocio del cavo.
parametri 2.Technical
| Velocità di avvolgimento | 100m/min massimo |
| Tensione d'avvolgimento | 30N~300N |
| Diametro della bobina | 0.8M~1.6M |
| Barilotto | Minuto 400mm |
| Diametro del prodotto | 6-18mm (può regolare) |
| Potere |
1.5KW |
specificazione 3.Main e prestazione
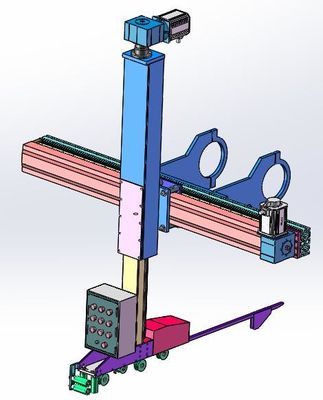
Dispositivo trasversale del braccio di A.Robot
La struttura è un manipolatore sospeso, che è integrato nel cavo a terra del cavalletto della ferrovia per prendere la struttura per risparmiare lo spazio vuoto dell'installazione. La dichiarazione relativa della trasformazione è divisa nell'ascissa e nell'asse y. L'ascissa è la direzione trasversale orizzontale e l'asse y è la direzione in aumento verticale. Nessun intervento umano è richiesto nel corso della traversata;
Modo trasversale: Traversata lineare della vite della palla della ferrovia di guida del servomotore +HIWIN di Panasonic +TBI; È più stabile del tipo tradizionale del cavalletto ed ha meno errore. È più ordinata. Il sollevamento automatico del braccio del robot è individuato dal sensore, di modo che l'angolo fra il braccio del robot e la bobina del cavo è sempre coerente e la traversata è ordinata. La struttura di sollevamento dell'asse y è composta di ingranaggio a cremagliera elicoidale speciale lineare della ferrovia di guida della pista +YYC dello scorrevole del servomotore +HIWIN di panasonic. Struttura compatta, buon funzionamento
●Servomotore trasversale del motore 1KW panasonic
●Servomotore del motore 1KW panasonic di Lifiting
●HIWIN Taiwan HIWIN
●vite trasversale Taiwan TBI della palla
●Scaffale di sollevamento Taiwan YYC
●Viaggio trasversale orizzontale 1300mm dell'ascissa
●Viaggio aumentante verticale 1050mm dell'asse y
![]()